+48 794 246 362

Skaner stacjonarny TLS w inwentaryzacji budowy. Jaki naziemny skaner TLS wybrać?
Skanery TLS (Terrestrial Laser Scanning) to nowoczesne narzędzia wykorzystywane do skanowania obiektów w 3D. Są one szeroko stosowane w budownictwie, zwłaszcza w inwentaryzacji budynków i placów budowy. W jakim aspekcie wykorzystywane są skanery laserowe w budownictwie i jaki naziemny skaner TLS wybrać?
Jak skanery TLS są wykorzystywane w inwentaryzacji budowy?
- Dokładne odwzorowanie 3D: Skaner laserowy TLS pozwala na tworzenie bardzo szczegółowych modeli 3D budynków, placów budowy czy terenu. Urządzenia te emitują promień laserowy, który odbija się od powierzchni obiektu i mierzy czas powrotu sygnału, co pozwala na precyzyjne odwzorowanie przestrzenne.
- Pomiar bezdotykowy: Inwentaryzacja architektoniczna 3D przy użyciu skanerów TLS nie wymaga fizycznego kontaktu z mierzonym obiektem, co jest szczególnie przydatne w trudnodostępnych lub niebezpiecznych miejscach, takich jak wysokie konstrukcje, podesty, galerie czy miejsca z ryzykiem upadków.
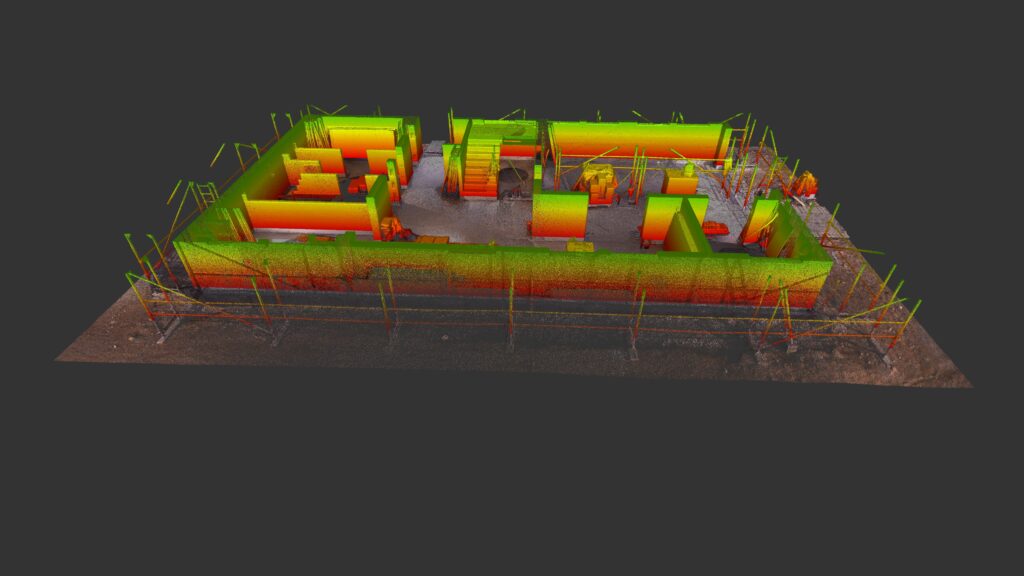
- Rejestrowanie dużej ilości danych: Skanery TLS mogą przechwytywać miliony punktów na sekundę (tzw. chmury punktów), tworząc szczegółowe modele 3D, które mogą być używane do analizy konstrukcji, zgodności z projektem oraz późniejszych modernizacji.
- Dokumentacja postępów: Dzięki skanom można regularnie monitorować postęp budowy, co pozwala porównać aktualny stan z pierwotnymi planami oraz ocenić, czy prace są realizowane zgodnie z harmonogramem i standardami.


Jakie dane można uzyskać z TLS?
- Chmura punktów: Głównym wynikiem pracy skanera TLS jest chmura punktów, czyli zbiór współrzędnych XYZ, które precyzyjnie odwzorowują kształt i powierzchnię skanowanego obiektu.
- Modele 3D: Na podstawie chmury punktów można tworzyć realistyczne modele 3D obiektów, które mogą być importowane do oprogramowania CAD/BIM w celu dalszej analizy i modelowania parametrycznego.
- Dokładne wymiary: TLS pozwala na uzyskanie bardzo precyzyjnych danych na temat wymiarów obiektów (np. odległości między elementami konstrukcyjnymi, grubość ścian, szerokości pomieszczeń, całych konstrukcji czy budynków itp.).
- Mapy deformacji: Analiza skanów z różnych etapów budowy pozwala na wykrycie ewentualnych deformacji czy odchyłek w konstrukcji, co jest kluczowe dla zapewnienia bezpieczeństwa i jakości budowli. Często stosowana praktyka np. do niwelacji posadzki.
Korzyści dla klienta wynikające z zastosowania skanera 3D:
- Precyzja: Dzięki TLS można uzyskać bardzo dokładne dane, co zmniejsza ryzyko błędów pomiarowych i pozwala na lepszą kontrolę jakości.
- Oszczędność czasu i kosztów: Tradycyjne metody pomiarowe są czasochłonne i wymagają większej ilości pracy ludzkiej. TLS umożliwia szybkie zebranie danych z dużych powierzchni, co skraca czas inwentaryzacji i obniża koszty związane z pracą.
- Lepsza wizualizacja projektu: Trójwymiarowe modele powstałe na bazie skanów TLS pozwalają klientom na lepsze zrozumienie projektu i jego postępów. Jest to szczególnie przydatne w komunikacji z inwestorami, którzy mogą wizualizować budowę bez konieczności odwiedzin na placu.
- Monitorowanie postępów: Regularne skanowanie budowy pozwala klientowi śledzić postępy i porównywać stan faktyczny z planami. Może to zapobiec opóźnieniom, błędom w realizacji czy kosztownym poprawkom.
- Dokumentacja powykonawcza: Po zakończeniu budowy TLS może służyć do stworzenia dokładnej dokumentacji powykonawczej, co jest cenne dla zarządzania obiektem w przyszłości.
Skanery TLS oferują zarówno dokładność, jak i efektywność, co sprawia, że są niezastąpione w nowoczesnych projektach budowlanych.
Jakie są typy skanerów TLS i jaki naziemny skaner TLS wybrać?
Skanery laserowe to bezkontaktowe systemy pomiarowe, które działają na bazie światła laserowego. Czujnik skanera laserowego emituje wiązkę laserową, która odbija się od otoczenia i jest ponownie odbierana przez optykę odbiorczą skanera laserowego. W urządzeniach stosowane są dwie metody pomiarowe: metoda czasu przelotu Time of Flight (TOF) i metoda oparta na pomiarze fazy (Phase Shift).
Skanery laserowe dzielą się zatem na grupy skanerów laserowych TOF i opartych na fazie. Na rynku reprezentowane są również systemy z procedurami łączonymi. Każda metoda ma szczególne zalety, które predestynują ją do określonych zastosowań. Skanery TLS (Terrestrial Laser Scanning) można podzielić na różne typy w zależności od technologii działania oraz zastosowania. Główne typy skanerów TLS ze względu na sposób pomiaru odległości to:
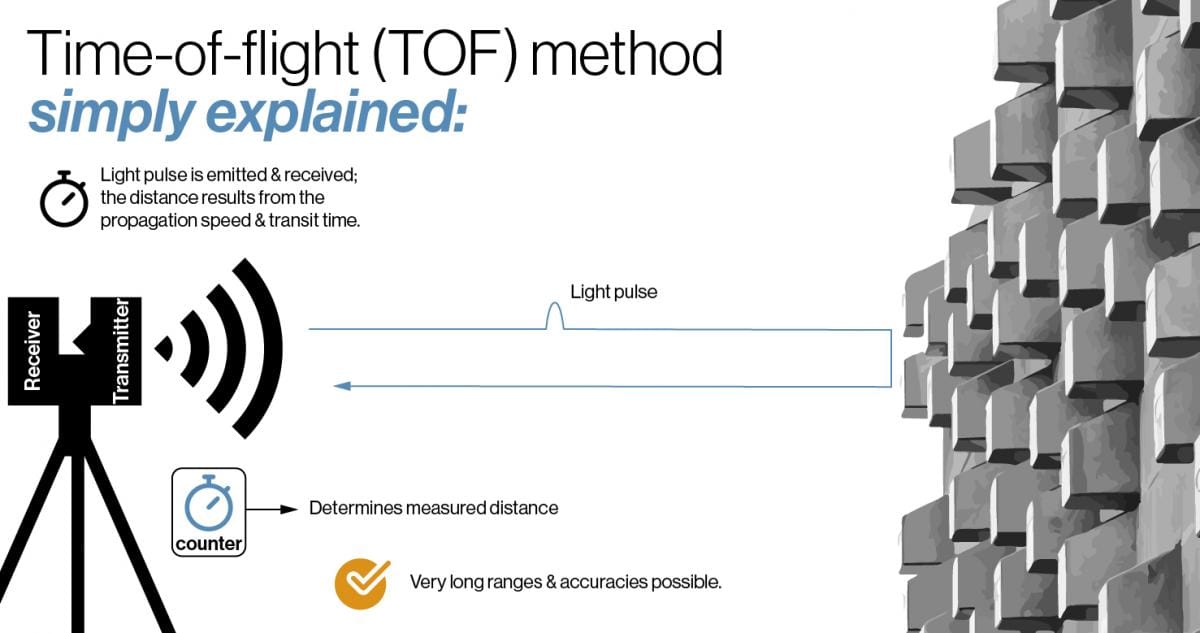
Skanery impulsowe (Time of Flight – ToF)
Zasada działania: Działają na zasadzie pomiaru czasu, jaki zajmuje wiązce lasera na dotarcie do obiektu i powrót do skanera. Na podstawie tego pomiaru obliczana jest odległość do punktu na obiekcie
Zastosowanie: Są one wykorzystywane głównie do skanowania dużych odległości, często do kilkuset metrów, co czyni je idealnymi do skanowania terenów zewnętrznych, dużych budowli, kopalń czy mostów.

Skaner stacjonarny impulsowy zalety
Duży zasięg pomiaru, co pozwala na skanowanie z większych odległości.
Wysoka dokładność na większych dystansach.
Skaner TLS stacjonarny impulsowy wady
W niektórych przypadkach wolniejszy czas skanowania w porównaniu do innych technologii.
Skaner ciężki, mniej mobilny niż fazowy, droższy.
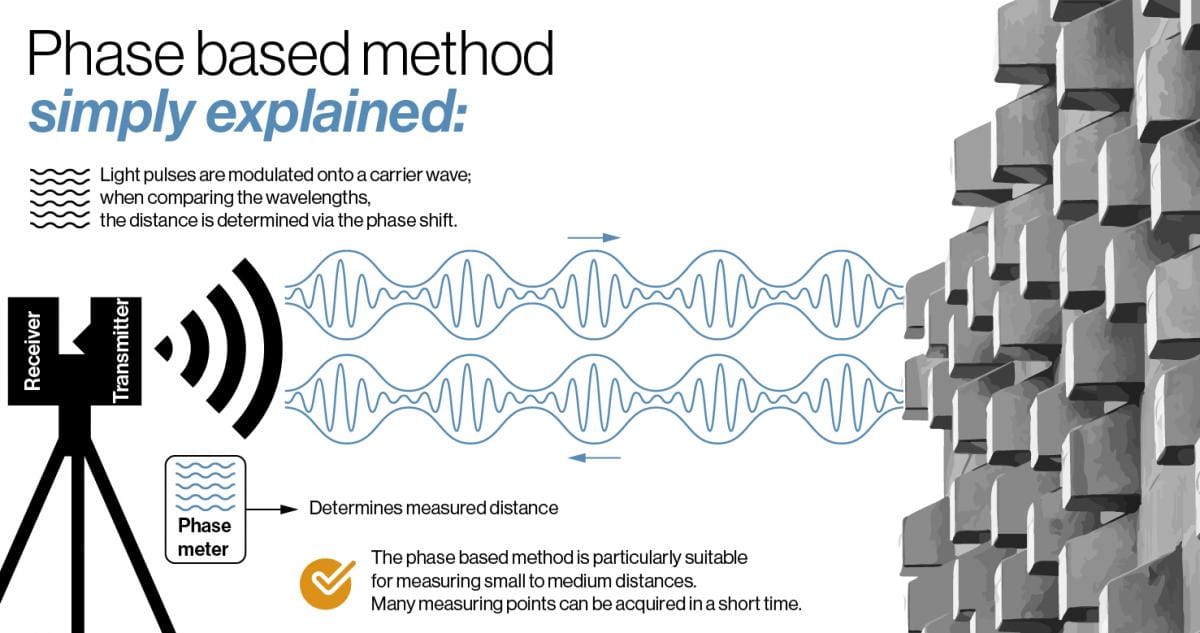
2. Skanery fazowe
Zasada działania: Oparte na analizie przesunięcia fazowego fali świetlnej (tzw. Phase-Shift). Skaner emituje falę laserową o zmiennej częstotliwości, a na podstawie różnicy faz między wysłanym a odebranym sygnałem obliczana jest odległość do obiektu.
Zastosowanie:
Zazwyczaj stosowane w pomieszczeniach lub na mniejszych obszarach na placach budowy, gdzie wymagane są szybkie pomiary na krótkich dystansach.

Zalety:
- Bardzo szybka prędkość skanowania.
- Wysoka rozdzielczość i dokładność na krótszych dystansach (do około 100 metrów).
Wady:
- Mniejszy zasięg pomiaru w porównaniu do skanerów impulsowych.
Upraszczając można stwierdzić, że skanery impulsowe są urządzeniami wolniejszymi (rejestracja do ok. 200 tys. pkt./s), nieco mniej dokładnymi, ale o większym zasięgu (od ok. 100 metrów do kilku kilometrów), zaś fazowe – szybszymi (rejestracja nawet do 2 mln pkt./s), dokładniejszymi, ale o zdecydowanie krótszym zasięgu (od kilku do ok. 100 metrów). Te pierwsze są więc dedykowane do monitoringu krajobrazowego, rejestracji obiektów i procesów z zakresu geomorfologii czy geologii, prac topograficznych i górniczych, zaś drugie wykorzystuje się przede wszystkim w architekturze, inżynierii budowlanej, energetyce itp.
Jakie rodzaje skanerów wyróżniamy ze względu na sposób zbierania danych?
1. Skanery mobilne
Zasada działania: Zintegrowane z pojazdami lub przenośnymi systemami (np. na plecaku, samochodzie) w celu skanowania podczas ruchu. Są wyposażone w systemy pozycjonowania GPS lub jednostki inercyjne IMU, co pozwala na rejestrowanie danych w ruchu.


Zastosowanie:
- Skanowanie dużych terenów, autostrad, linii kolejowych lub obszarów miejskich w sposób dynamiczny, bez konieczności zatrzymywania się w każdym punkcie.
Zalety:
- Bardzo szybkie zbieranie danych.
- Możliwość skanowania dużych obszarów w krótkim czasie.
Wady:
- Mniejsza dokładność w porównaniu do stacjonarnych skanerów TLS.
2. Skanery stacjonarne
Zasada działania: Stacjonarne skanery TLS montowane są na statywie i wykonują skanowanie z jednego, statycznego punktu dookoła siebie. Są one zazwyczaj używane do dokładnego skanowania pojedynczych obiektów lub miejsc. Jest to jeden z najczęściej spotykanych na rynku rodzaju skanerów. Mają również największy wybór modeli wśród wiodących producentów.
Zastosowanie:
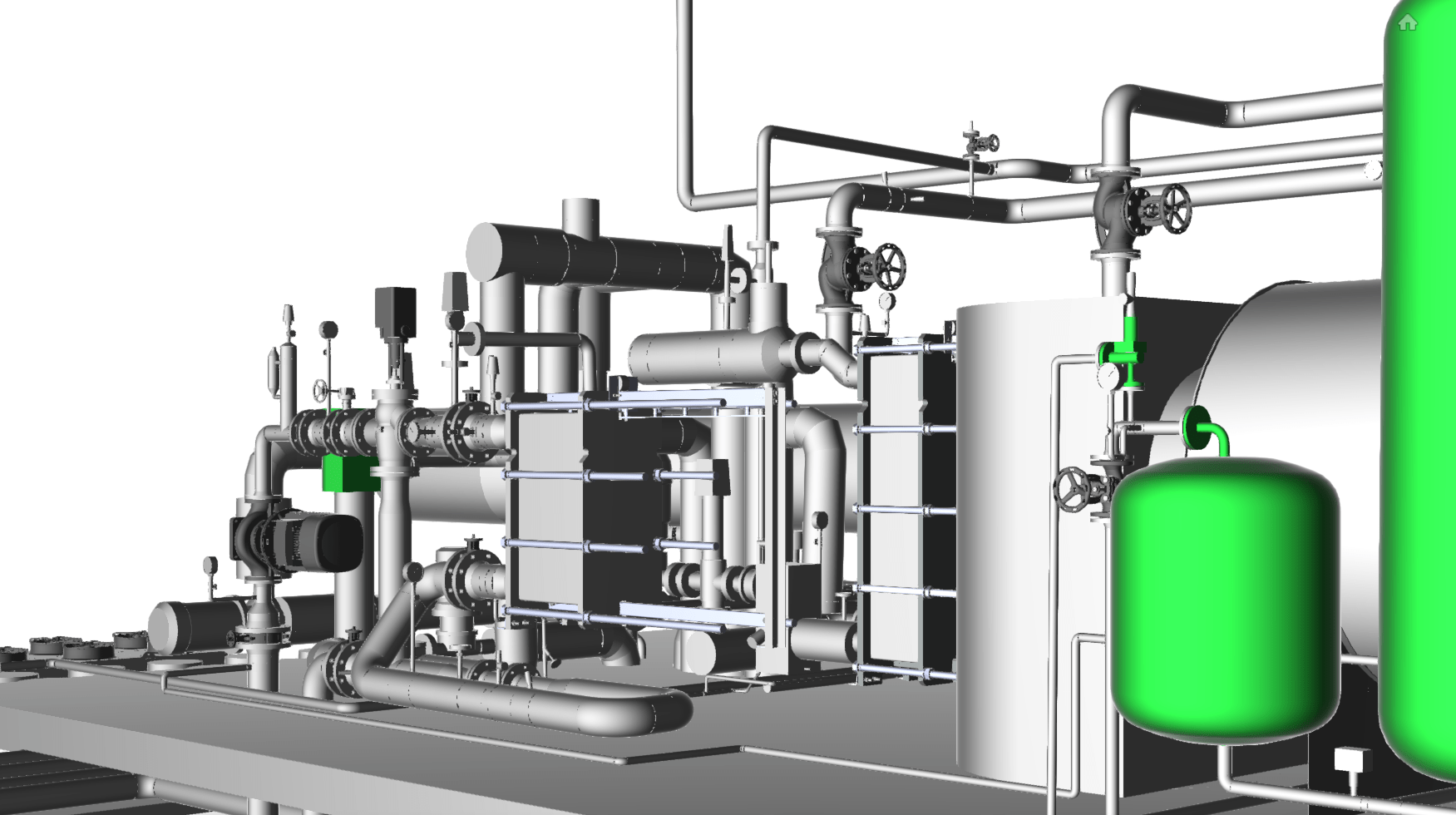
- Wykorzystywane na placach budowy, wewnątrz budynków, w architekturze zabytkowej, archeologii, a także w skanowaniu instalacji technicznych gdzie potrzebna jest wysoka dokładność skanowania.
Zalety:
- Wysoka precyzja, idealne do szczegółowego skanowania małych obszarów.
Wady:
- Dłuższy czas skanowania w porównaniu do skanerów mobilnych.
3. Skanery ręczne
Zasada działania: Lekkie, przenośne urządzenia, które pozwalają operatorowi na ręczne skanowanie mniejszych obiektów. Działają na zasadzie emisji wiązki lasera, a operator przesuwa urządzenie wokół skanowanego obiektu trzymając je w ręku.



Zastosowanie:
- Do skanowania małych, złożonych obiektów lub miejsc trudno dostępnych, takich jak wnętrza budynków, czy elementy architektoniczne.
Zalety:
- Mobilność i łatwość obsługi.
- Możliwość skanowania w ciasnych przestrzeniach.
Wady:
- Mniejszy zasięg i dokładność w porównaniu do większych, stacjonarnych i mobilnych skanerów TLS.
Podsumowanie:
Każdy typ skanera TLS ma swoje specyficzne zastosowania, zalety i wady. Wybór odpowiedniego typu zależy od konkretnych wymagań projektu, takich jak zasięg pomiaru, potrzebna dokładność, oraz warunki pracy (wewnątrz czy na zewnątrz). Skanery impulsowe są idealne do skanowania dużych obszarów, fazowe zapewniają szybkość i dokładność na krótkich dystansach, a mobilne skanery pozwalają na dynamiczne zbieranie danych na dużych powierzchniach.
Zobacz realizacje gdzie sprawdza się skaning 3D









Jakie są wiodące marki skanerów stacjonarnych TLS?
Na rynku istnieje wiele renomowanych producentów skanerów TLS (Terrestrial Laser Scanning), którzy oferują zaawansowane technologicznie urządzenia dostosowane do różnorodnych potrzeb projektów budowlanych, geodezyjnych, czy przemysłowych. Oto kilka czołowych marek, które są często rekomendowane:
1. Leica Geosystems
Leica to jeden z najbardziej rozpoznawalnych producentów w dziedzinie geodezji i skanowania laserowego. Firma oferuje szeroką gamę rozwiązań TLS, które charakteryzują się wysoką precyzją i niezawodnością.
Popularne modele:
- Leica RTC360 – Szybki i wydajny skaner, idealny do użytku zarówno w terenie, jak i w budynkach. Oferuje automatyczną rejestrację danych w chmurze punktów.
- Leica BLK360 – Lekki, przenośny skaner, który jest łatwy w obsłudze i zapewnia wysoką jakość danych. Sprawdzi się zarówno w mniejszych projektach, jak i w zastosowaniach inżynierskich.
- Leica ScanStation P40/P50 – Profesjonalne skanery z dużym zasięgiem i precyzją, idealne do dużych projektów budowlanych i inżynierskich.
Zalety:
- Wysoka precyzja i niezawodność.
- Szeroki zakres zastosowań, od mniejszych po zaawansowane projekty.
- Rozwinięte oprogramowanie do przetwarzania danych.
2. Trimble
Trimble to światowy lider w dziedzinie technologii pozycjonowania, oferujący innowacyjne rozwiązania dla geodezji, budownictwa i inżynierii. Marka Trimble zapewnia szeroki wybór skanerów TLS, które są znane z solidnej konstrukcji i wszechstronności.
Popularne modele:
- Trimble TX8 – Szybki skaner fazowy, który zapewnia doskonałą dokładność na średnich i dużych odległościach. Idealny do dużych placów budowy, mostów, tuneli i instalacji przemysłowych.
- Trimble X7 – Kompaktowy skaner TLS o wysokiej precyzji, przeznaczony do użytku w różnorodnych warunkach terenowych. Oferuje automatyczną kalibrację i rejestrację danych.
- Trimble X9 – Zbudowany w oparciu o sprawdzone technologie skanowania laserowego Trimble, które obejmują automatyczną kalibrację instrumentu, samopoziomowanie i wskaźnik laserowy do georeferencji, skaner Trimble X9 z oprogramowaniem Trimble Perspective zapewnia niezawodną pracę w terenie i w biurze. Przeznaczony dla najbardziej wymagających projektów.
Zalety:
- Solidna konstrukcja i trwałość.
- Wysoka prędkość skanowania i dokładność.
- Intuicyjne oprogramowanie Trimble RealWorks do przetwarzania i analizy danych.
3. FARO Technologies
FARO jest jednym z czołowych producentów skanerów laserowych na świecie, specjalizując się w rozwiązaniach do metrologii, budownictwa i skanowania 3D. Produkty FARO są znane z mobilności i prostoty obsługi.
Popularne modele:
- FARO Focus S350 – Wysokiej klasy skaner TLS o dużym zasięgu (do 350 metrów), idealny do skanowania terenów zewnętrznych i wnętrz budynków.
- FARO Focus S150 – Bardziej kompaktowy model do skanowania na krótsze odległości, idealny do mniejszych projektów wewnętrznych i zewnętrznych.
Zalety:
- Kompaktowa konstrukcja i łatwość przenoszenia.
- Intuicyjne oprogramowanie FARO Scene do zarządzania i analizy danych.
- Bardzo wysoka dokładność w szerokim zakresie warunków pracy.
4. RIEGL
RIEGL to firma znana z produkcji laserowych systemów pomiarowych, w tym skanerów naziemnych. Skanery tej firmy cechuje zaawansowana technologia impulsowa, co pozwala na precyzyjne skanowanie dużych obiektów i terenów.
Popularne modele:
- RIEGL VZ-400i – Bardzo zaawansowany skaner impulsowy z możliwością skanowania na duże odległości (do 800 metrów), idealny do geodezji, inżynierii lądowej oraz dokumentacji budynków.
- RIEGL VZ-2000 – Skaner o jeszcze większym zasięgu, do 2 kilometrów, idealny do zastosowań w rozległych terenach oraz w geodezji przemysłowej.
Zalety:
- Bardzo duży zasięg pomiaru.
- Doskonała precyzja na dużych dystansach.
- Szerokie możliwości integracji z innymi systemami pomiarowymi.
5. Zoller + Fröhlich (Z+F)
Z+F to niemiecki producent skanerów laserowych, znany z solidnych urządzeń o wysokiej precyzji i szybkości skanowania. Firma oferuje skanery do zastosowań zarówno wewnątrz budynków, jak i w terenie.
Popularne modele:
- Z+F IMAGER 5016 – Kompaktowy, lekki skaner o dużym zasięgu, idealny do zastosowań zarówno wewnętrznych, jak i zewnętrznych. Oferuje dużą dokładność i intuicyjne oprogramowanie.
Zalety:
- Bardzo wysoka precyzja.
- Kompaktowa konstrukcja, łatwa do przenoszenia.
- Wysoka szybkość skanowania.
Topcon
Opis: Topcon to japoński producent urządzeń pomiarowych, który dostarcza różnorodne rozwiązania do geodezji, inżynierii oraz skanowania laserowego. Produkty Topcon są znane z łatwości obsługi i integracji z innymi systemami pomiarowymi.
Popularne modele:
- Topcon GLS-2000 – Skaner impulsowy o dużej prędkości i dokładności, z zasięgiem do 350 metrów. Jest idealny do szerokiego zakresu zastosowań, od dokumentacji budynków po inżynierię lądową.
Zalety:
- Łatwa obsługa.
- Szybkość skanowania.
- Zintegrowane oprogramowanie do zarządzania danymi.
Podsumowanie:
Wybór odpowiedniego skanera TLS zależy od specyfiki projektu, takich jak wymagania dotyczące zasięgu, precyzji i mobilności. Jeśli priorytetem jest duży zasięg i precyzja, warto rozważyć skanery Leica, RIEGL lub Trimble. W przypadku mniejszych projektów i mobilności, FARO i Z+F oferują łatwe w użyciu, przenośne rozwiązania.

Jakie oprogramowanie do skanera laserowego TLS?
Oprogramowanie do obsługi skanerów TLS (Terrestrial Laser Scanning) odgrywa kluczową rolę w zarządzaniu i analizie danych pozyskanych podczas skanowania. Obejmuje ono procesy przetwarzania chmur punktów, tworzenia modeli 3D, rejestracji danych oraz integracji z narzędziami CAD/BIM. Oto przegląd najczęściej stosowanego oprogramowania:
1. Leica Cyclone (Leica Geosystems)
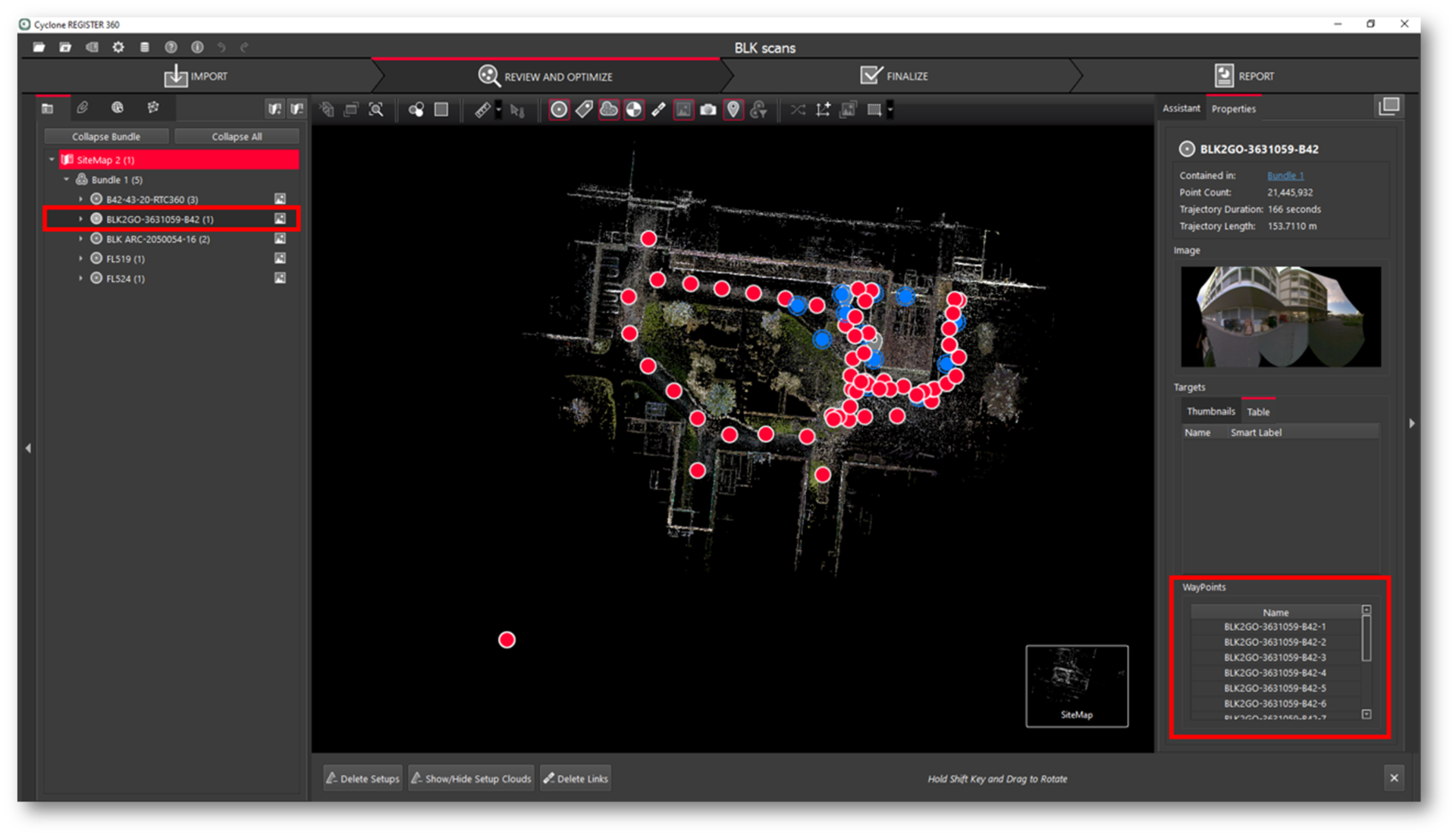
Cyclone to kompleksowe oprogramowanie do zarządzania danymi ze skanerów TLS firmy Leica Geosystems. Oferuje szeroki zakres funkcji, od rejestracji chmur punktów, przez tworzenie modeli 3D, aż po generowanie dokumentacji technicznej.
Główne funkcje:
- Rejestracja chmur punktów (automatyczna i ręczna).
- Tworzenie modeli CAD i BIM.
- Eksport do popularnych formatów, takich jak .dwg, .dxf, .e57, .las.
- Wizualizacja i analiza danych 3D.
- Współpraca z platformą Leica TruView do udostępniania danych w chmurze.
Zalety:
- Bardzo rozbudowane narzędzia do przetwarzania chmur punktów.
- Intuicyjna rejestracja danych i generowanie dokumentacji.
- Wsparcie dla wielu formatów i integracja z innymi systemami.
2. Trimble RealWorks (Trimble)
RealWorks to dedykowane oprogramowanie Trimble do przetwarzania danych ze skanerów TLS. Oferuje zaawansowane narzędzia do rejestracji, edycji, analizy i wizualizacji chmur punktów.

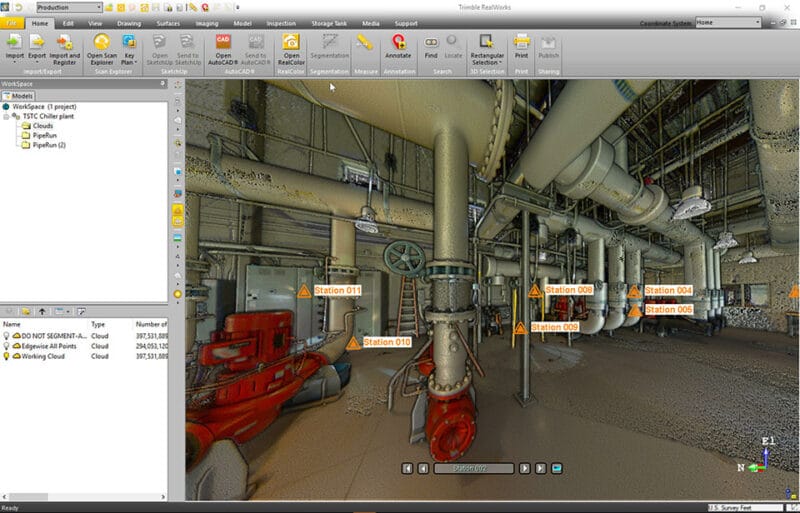
Główne funkcje:
- Zaawansowana rejestracja i korelacja chmur punktów.
- Tworzenie przekrojów i modeli 3D.
- Narzędzia do analizy deformacji i kontroli jakości.
- Integracja z oprogramowaniem CAD, BIM, oraz GIS.
Zalety:
- Doskonała integracja z ekosystemem Trimble.
- Rozbudowane narzędzia do analizy i kontroli jakości.
- Łatwe zarządzanie dużymi zestawami danych.
FARO Scene (FARO Technologies)
FARO Scene to oprogramowanie dedykowane skanerom TLS FARO, służące do przetwarzania, rejestracji i wizualizacji chmur punktów. Jest znane z prostoty obsługi i intuicyjnego interfejsu.

Główne funkcje:
- Automatyczna rejestracja chmur punktów.
- Tworzenie panoramicznych widoków 3D i modeli.
- Eksport do popularnych formatów (m.in. .e57, .pts, .las).
- Narzędzia do analizy odległości, powierzchni, oraz objętości.
Zalety:
- Szybka i łatwa rejestracja danych.
- Intuicyjny interfejs, nawet dla mniej zaawansowanych użytkowników.
- Wsparcie dla modeli CAD i eksport do wielu formatów.
4. RIEGL RiSCAN PRO (RIEGL)
RiSCAN PRO to oprogramowanie dedykowane skanerom laserowym firmy RIEGL. Jest przeznaczone do rejestracji, przetwarzania oraz analizy danych z zaawansowanych skanerów impulsowych.
Główne funkcje:
- Precyzyjna rejestracja chmur punktów.
- Zaawansowane narzędzia do analizy deformacji i przemieszczeń.
- Wizualizacja danych 3D w czasie rzeczywistym.
- Eksport do wielu formatów dla dalszej analizy w oprogramowaniu CAD.
Zalety:
- Dedykowane narzędzia dla zaawansowanych zastosowań inżynierskich.
- Wysoka dokładność przetwarzania danych.
- Możliwość analizy danych w czasie rzeczywistym.
5. Z+F LaserControl (Zoller + Fröhlich)
LaserControl to oprogramowanie służące do przetwarzania danych z TLS firmy Z+F. Jest zoptymalizowane do pracy z chmurami punktów oraz do integracji z innymi narzędziami do modelowania.
Główne funkcje:
- Rejestracja chmur punktów.
- Tworzenie modeli CAD i BIM.
- Eksport do popularnych formatów, takich jak .dxf, .e57.
- Narzędzia do analizy danych, takich jak przemieszczenia i deformacje.
Zalety:
- Wysoka precyzja rejestracji danych.
- Prosta i intuicyjna obsługa.
- Zoptymalizowane narzędzia do współpracy z modelami CAD.
6. Autodesk ReCap
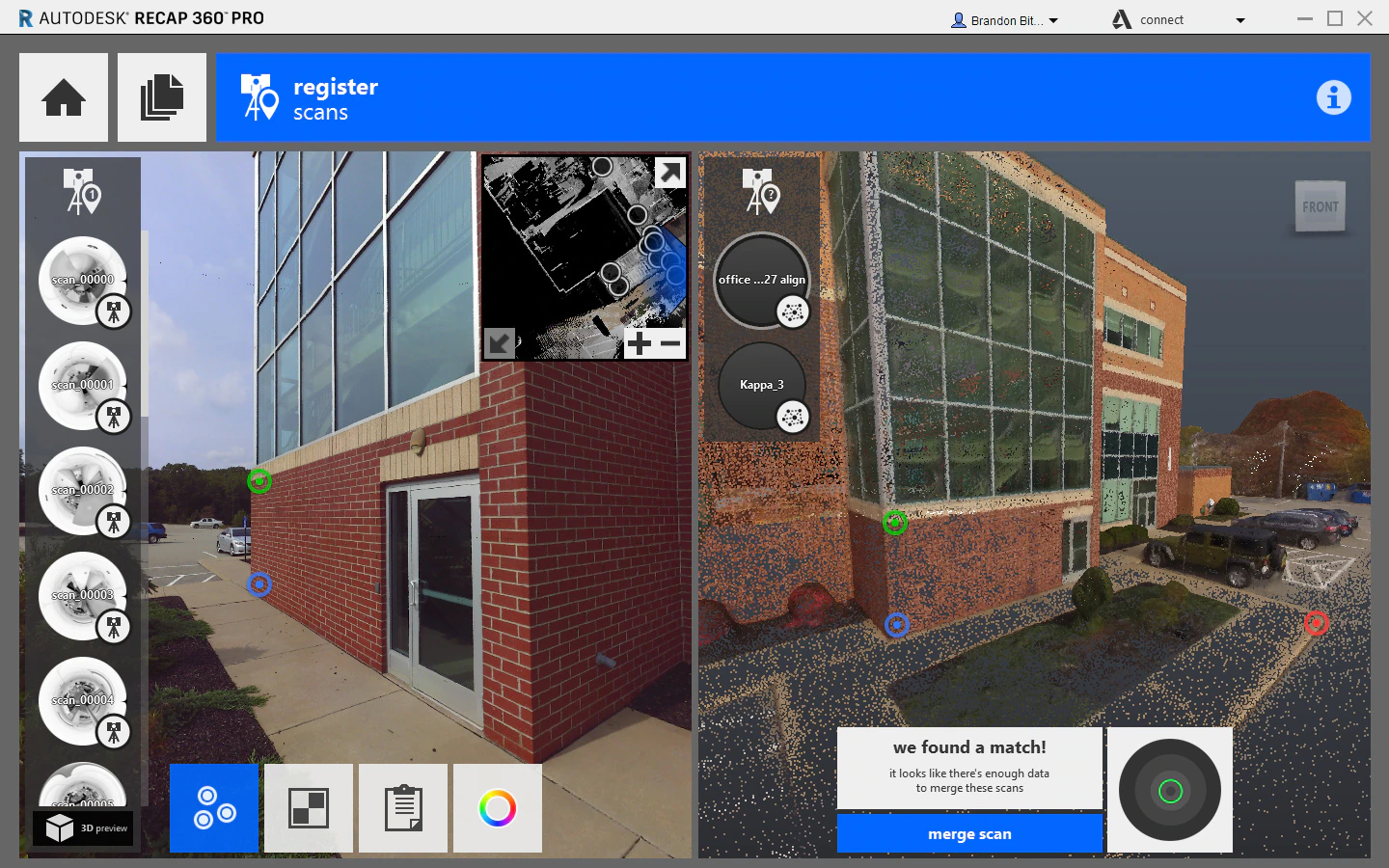
Autodesk ReCap to oprogramowanie przeznaczone do przetwarzania chmur punktów i tworzenia modeli 3D, które można integrować z platformą Autodesk (AutoCAD, Revit, Civil 3D). Jest to popularne rozwiązanie w inżynierii budowlanej i architekturze.
Główne funkcje:
- Przetwarzanie chmur punktów i tworzenie modeli 3D.
- Integracja z oprogramowaniem CAD/BIM, takimi jak Revit, AutoCAD, Civil 3D.
- Wizualizacja danych 3D i analiza geometrii.
- Eksport danych do różnych formatów, w tym .rvt, .dwg, .fbx, .obj.
Zalety:
- Doskonała integracja z narzędziami Autodesk.
- Łatwość w przetwarzaniu dużych zestawów danych.
- Intuicyjna obsługa i możliwość pracy z różnymi formatami plików.
7. CloudCompare
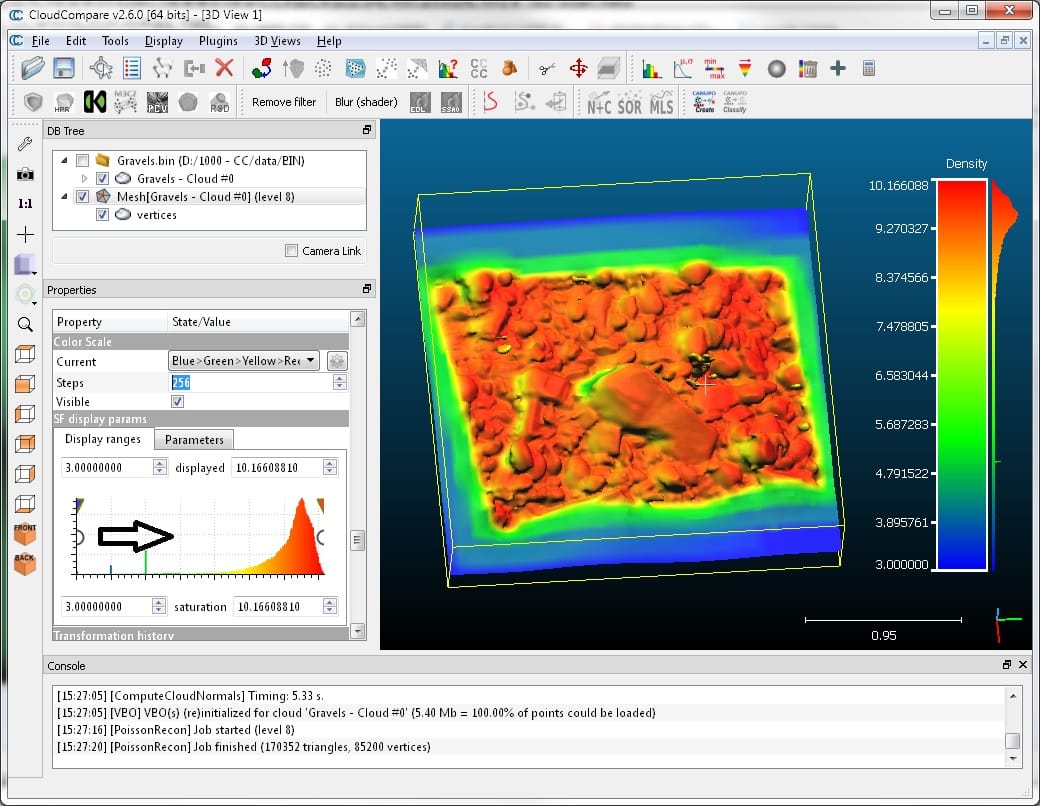
CloudCompare to darmowe, otware źródłowe oprogramowanie do przetwarzania chmur punktów. Jest często używane jako alternatywa dla komercyjnych rozwiązań w celu analizy i wizualizacji danych TLS.
Główne funkcje:
- Rejestracja chmur punktów.
- Wizualizacja 3D i analiza danych.
- Tworzenie przekrojów i modeli 3D.
- Eksport do różnych formatów, takich jak .ply, .las, .obj.
Zalety:
- Darmowe oprogramowanie z dużą funkcjonalnością.
- Szeroki zakres formatów eksportu i importu.
- Rozbudowane narzędzia do analizy porównawczej chmur punktów.
8. Bentley Pointools
Bentley Pointools to oprogramowanie do edycji i wizualizacji chmur punktów, które integruje się z platformą Bentley. Jest szczególnie popularne w inżynierii lądowej i projektach infrastrukturalnych.
Główne funkcje:
- Zaawansowana rejestracja chmur punktów.
- Narzędzia do analizy geometrii, odległości i deformacji.
- Możliwość integracji z oprogramowaniem Bentley (MicroStation, OpenRoads).
Zalety:
- Doskonała integracja z ekosystemem Bentley.
- Wysoka wydajność w pracy z dużymi zestawami danych.
- Współpraca z narzędziami BIM.
Podsumowanie:
Wybór odpowiedniego oprogramowania do TLS zależy od konkretnych potrzeb projektu. Leica Cyclone, Trimble RealWorks, i FARO Scene są doskonałymi rozwiązaniami dla użytkowników sprzętu tych marek, oferując pełną integrację z danymi ze skanerów. Autodesk ReCap jest świetną opcją dla firm, które chcą łączyć dane TLS z projektami CAD/BIM. Dla projektów wymagających większej elastyczności lub ograniczonego budżetu, CloudCompare oferuje solidną funkcjonalność jako darmowe narzędzie.
Ile kosztuje skaner stacjonarny TLS?
Koszt skanera TLS (Terrestrial Laser Scanner) zależy od wielu czynników, takich jak marka, model, specyfikacja techniczna, zasięg skanowania, precyzja, dodatkowe funkcje (np. automatyczna rejestracja danych), a także czy sprzęt jest nowy czy używany. Przybliżony przedział cenowy dla różnych kategorii skanerów TLS przedstawia się następująco:
1. Skanery budżetowe / podstawowe (dla mniejszych projektów)
Skanery te są często stosowane w mniejszych projektach, takich jak dokumentacja wnętrz budynków, małych konstrukcji lub dla potrzeb projektów architektonicznych. Mają zwykle mniejszy zasięg i dokładność w porównaniu do modeli zaawansowanych.
Przykłady:
- Leica BLK360
- FARO Focus S70
Koszt: 50 000 – 120 000 PLN
Charakterystyka:
- Zasięg: około 60-120 metrów.
- Przenośność, niewielkie rozmiary.
- Łatwa obsługa, szybka rejestracja danych.
2. Skanery średniej klasy (dla średnich i dużych projektów)
Te skanery oferują lepszą precyzję i większy zasięg, co sprawia, że nadają się do większych projektów, takich jak skanowanie budynków, terenów przemysłowych, mostów, tuneli, a także dla projektów inżynieryjnych.
Przykłady:
- Trimble X7
- FARO Focus S150/S350
- Leica RTC360
Koszt: 120 000 – 300 000 PLN
Charakterystyka:
- Zasięg: 150–350 metrów.
- Wysoka dokładność (rzędu milimetrów).
- Automatyczna rejestracja i kalibracja chmur punktów.
- Większa szybkość i możliwość przetwarzania dużych ilości danych.
3. Skanery zaawansowane / przemysłowe (dla dużych projektów inżynierskich i geodezyjnych)
Zaawansowane skanery TLS są przeznaczone do największych i najbardziej wymagających projektów, takich jak skanowanie rozległych terenów, dużych instalacji przemysłowych, kopalni, zapór, dróg i autostrad. Cechują się bardzo dużym zasięgiem, najwyższą precyzją i wytrzymałością na trudne warunki pracy.
Przykłady:
- Leica ScanStation P40/P50
- RIEGL VZ-400i
- Trimble TX8
Koszt: 200 000 – 700 000+ PLN
Charakterystyka:
- Zasięg: do 1-2 kilometrów (w przypadku niektórych modeli nawet więcej).
- Bardzo wysoka precyzja (rzędu milimetrów, nawet na dużych odległościach).
- Duża odporność na warunki atmosferyczne.
- Możliwość integracji z systemami GNSS (Global Navigation Satellite System) dla dokładnego pozycjonowania.
4. Dodatkowe koszty
Oprócz zakupu samego skanera, należy uwzględnić dodatkowe koszty:
- Oprogramowanie: Oprogramowanie do przetwarzania danych ze skanera (np. Leica Cyclone, Trimble RealWorks, FARO Scene) może kosztować od kilku do kilkudziesięciu tysięcy złotych, w zależności od funkcji i licencji.
- Szkolenie: Koszt szkolenia operatorów skanera może wynosić od kilku do kilkunastu tysięcy złotych.
- Akcesoria: Statywy, baterie, walizki transportowe, dodatkowe sensory mogą podnieść koszt o kilka tysięcy złotych.
- Utrzymanie i serwis: Koszty konserwacji i serwisowania sprzętu, które mogą być dość wysokie w przypadku zaawansowanych urządzeń.
Podsumowanie
Koszt skanera TLS może wynosić od 50 000 PLN do ponad 700 000 PLN, w zależności od klasy urządzenia, jego funkcji oraz specyficznych wymagań projektu. Dla klienta kluczowe jest dobranie odpowiedniego modelu do skali projektu, aby osiągnąć odpowiednią równowagę między kosztami a potrzebami w zakresie precyzji, zasięgu i funkcjonalności.
Jak długo trwa skanowanie laserowe wykonywane skanerem TLS?
Czas potrzebny na wykonanie skanowania przy użyciu skanera TLS (Terrestrial Laser Scanner) zależy od kilku czynników, takich jak:
- Rozdzielczość skanowania: Wyższa rozdzielczość oznacza więcej szczegółów, ale jednocześnie wydłuża czas skanowania, ponieważ skaner wykonuje więcej pomiarów na danym obszarze. Wybór rozdzielczości zależy od wymagań projektu.
- Zakres obszaru do skanowania: Im większy obszar lub bardziej złożona struktura, tym więcej stanowisk (pozycji) skanera będzie wymaganych, co wydłuży całkowity czas potrzebny na ukończenie skanowania.
- Rodzaj skanera: Różne modele TLS mają różne prędkości skanowania. Nowoczesne skanery mogą zbierać miliony punktów na sekundę, co pozwala na szybkie wykonywanie pomiarów.
- Warunki terenowe: Skanowanie na otwartym terenie może być szybsze, natomiast skanowanie w pomieszczeniach, zwłaszcza w ciasnych lub skomplikowanych przestrzeniach (np. tunele, mosty), może wymagać większej liczby ustawień skanera, co wpływa na czas.
Przybliżony czas skanowania dla różnych sytuacji:
- Skanowanie pojedynczego stanowiska (jednej pozycji skanera): Zazwyczaj trwa od 2 do 10 minut, w zależności od rozdzielczości i zasięgu skanera. Na przykład, skanowanie wysokiej rozdzielczości może zająć więcej czasu, np. 5-10 minut, podczas gdy skanowanie niskiej rozdzielczości może być ukończone w 2-3 minuty.
- Skaning laserowy budynku lub dużej przestrzeni wewnętrznej: W zależności od wielkości obiektu, skanowanie może trwać kilka godzin do kilku dni. Dla przykładu, średniej wielkości biurowiec można zeskanować w ciągu jednego dnia, ale w przypadku bardziej skomplikowanych lub większych budynków (np. fabryki, hale produkcyjne) czas może się wydłużyć.
- Skanowanie dużych terenów zewnętrznych: Dokumentacja większych terenów, takich jak plac budowy, kopalnia, czy infrastruktura drogowa, może trwać od kilku dni do tygodnia, w zależności od rozmiaru terenu i wymagań dotyczących szczegółowości.
- Skanowanie detali (np. zabytków): W przypadku skanowania zabytków, które wymagają bardzo wysokiej precyzji, czas skanowania może być dłuższy. Dokumentacja jednego obiektu może zająć kilka godzin do nawet kilku dni, w zależności od jego złożoności.

Dodatkowy czas:
- Przenoszenie skanera: Przy skanowaniu dużych obiektów konieczne jest przemieszczanie skanera pomiędzy różnymi stanowiskami, co również zajmuje czas, zwłaszcza w trudnych warunkach terenowych.
- Rejestracja i kalibracja danych: Po zakończeniu skanowania, dane z różnych stanowisk muszą zostać zarejestrowane i połączone w jedną chmurę punktów. Proces ten może być wykonany automatycznie przy użyciu oprogramowania, ale w przypadku większych projektów może wymagać dodatkowego czasu.
- Wykonywanie zdjęć RGB – czas skanowania wydłuża się kiedy wykonujemy dodatkowe zdjęcia skanerem 3D aby nadać chmurze barwę i móc identyfikować elementy nie tylko w skali szarości czy intensywności odbicia
Automatyzacja:
Nowoczesne skanery, takie jak Leica RTC360 czy Trimble X7, X9 oferują szybkie skanowanie i automatyczną rejestrację danych, co znacząco skraca czas potrzebny na przetwarzanie chmur punktów. Dzięki automatycznym funkcjom, czas całego procesu, od skanowania po gotowe dane, jest znacznie krótszy.
Podsumowanie:
- Pojedyncze skanowanie stanowiska: 2-10 minut.
- Mały/średni budynek: kilka godzin do jednego dnia.
- Duże budynki/kompleksy: od jednego do kilku dni.
- Rozległe tereny zewnętrzne: kilka dni do tygodnia.
Szybkość skanowania można zwiększyć, korzystając z nowoczesnych skanerów TLS i optymalnie planując liczbę oraz pozycje skanera.
Jakie są główne ograniczenia dla skanerów stacjonarnych TLS?
Skanowanie laserowe metodą TLS (Terrestrial Laser Scanning) oferuje wiele korzyści, jednak posiada również pewne ograniczenia, które mogą wpływać na jego efektywność w różnych warunkach. Oto główne ograniczenia technologii TLS:
1. Zasięg i linia widzenia
- Ograniczony zasięg: Skanery TLS mają ograniczony zasięg, który zwykle wynosi od kilkudziesięciu do kilkuset metrów (niektóre modele mogą osiągać zasięg do 1-2 km). Jednak dokładność pomiarów maleje wraz z odległością, zwłaszcza w przypadku dużych odległości lub niskiej jakości odbicia sygnału laserowego.
- Brak możliwości skanowania „przez przeszkody”: TLS wymaga bezpośredniej linii widzenia. Oznacza to, że nie można skanować przez ściany, drzewa, krzewy czy inne przeszkody, co wymaga częstego przenoszenia skanera i wykonywania skanów z wielu stanowisk, aby uzyskać pełny obraz otoczenia.
2. Wpływ warunków atmosferycznych
- Deszcz, mgła i śnieg: Warunki atmosferyczne, takie jak deszcz, mgła, śnieg lub kurz, mogą zakłócać pomiary. Woda i cząsteczki w powietrzu rozpraszają wiązkę lasera, co prowadzi do obniżenia jakości danych, błędów w rejestracji i strat w chmurze punktów.
- Bezpośrednie światło słoneczne: Skanery TLS mogą mieć problemy z dokładnym pomiarem w warunkach bezpośredniego nasłonecznienia, zwłaszcza gdy wiązka lasera jest odbijana od bardzo jasnych lub błyszczących powierzchni. Może to powodować przekłamania lub „szumy” w danych.
3. Odbicia od powierzchni
- Powierzchnie błyszczące i przezroczyste: Materiały takie jak szkło, lustra czy błyszczące metalowe powierzchnie mogą powodować odbicia lub załamania wiązki laserowej. Skaner może nieprawidłowo zarejestrować te powierzchnie, co prowadzi do błędów w chmurze punktów (np. „dziury” lub nieprawidłowe dane).
- Powierzchnie matowe lub pochłaniające światło: Powierzchnie, które pochłaniają światło, takie jak ciemne materiały lub bardzo chropowate struktury, mogą odbijać mniejszą ilość sygnału, co obniża dokładność pomiarów lub prowadzi do braku danych.
4. Czasochłonność skanowania i przetwarzania
- Przenoszenie skanera: W przypadku większych lub skomplikowanych przestrzeni, gdzie nie można uzyskać pełnej widoczności z jednego stanowiska, konieczne jest przenoszenie skanera i wykonywanie wielu pomiarów. To wydłuża czas potrzebny na zebranie danych.
- Czas przetwarzania danych: Choć nowoczesne oprogramowanie do TLS znacznie ułatwia pracę, przetwarzanie chmur punktów, ich rejestracja (łączenie danych z różnych stanowisk) oraz tworzenie modeli 3D może być czasochłonne, zwłaszcza w przypadku dużych projektów.
5. Duża ilość danych
- Obciążenie sprzętowe: Skanery TLS generują ogromne ilości danych w postaci chmur punktów. Przetwarzanie i analiza tak dużych zbiorów danych wymaga potężnych komputerów o dużej mocy obliczeniowej oraz odpowiedniego oprogramowania. Przechowywanie tych danych także może stanowić wyzwanie, szczególnie w przypadku wieloletnich projektów.
- Zarządzanie danymi: Im więcej danych zostanie zebranych, tym bardziej skomplikowany staje się ich organizacja i analiza. Istnieje ryzyko „utonięcia” w danych, jeśli proces przetwarzania i analizy nie zostanie odpowiednio zaplanowany.
6. Koszt sprzętu i oprogramowania
- Wysoki koszt zakupu: Skanery TLS, zwłaszcza zaawansowane modele, są bardzo drogie, z cenami sięgającymi nawet kilkuset tysięcy złotych. Do tego dochodzą koszty dodatkowego sprzętu (statywy, akcesoria), oprogramowania do przetwarzania danych, a także szkolenia operatorów.
- Koszty utrzymania: Koszty serwisu, kalibracji oraz aktualizacji oprogramowania mogą być znaczące. Ponadto wymagane są także regularne szkolenia dla pracowników, aby byli na bieżąco z nowinkami technologicznymi i funkcjonalnościami sprzętu.
7. Wymagana wiedza specjalistyczna
- Złożoność obsługi: Choć nowoczesne skanery TLS są coraz bardziej intuicyjne, obsługa i pełne wykorzystanie ich możliwości wymaga specjalistycznej wiedzy technicznej. Obejmuje to zarówno samo skanowanie, jak i późniejszą rejestrację, analizę oraz interpretację chmur punktów.
- Oprogramowanie do przetwarzania: Oprogramowanie służące do obróbki chmur punktów jest rozbudowane i wymaga zaawansowanej wiedzy, zwłaszcza w przypadku integracji z innymi systemami CAD/BIM lub przy analizie zaawansowanych projektów inżynierskich.
8. Ograniczona mobilność w trudnym terenie
- Trudny teren i przestrzenie ograniczone: Skanery TLS są zazwyczaj ciężkie i wymagają statywów, co może utrudniać ich transport i ustawienie w trudno dostępnych miejscach, takich jak strome zbocza, wnętrza jaskiń, czy ciasne przestrzenie przemysłowe.
- Skanowanie dużych terenów: Na dużych, rozległych obszarach (np. w przypadku kopalni lub rozległych terenów budowlanych) samo przenoszenie skanera między stanowiskami może być czasochłonne i logistycznie skomplikowane.
9. Ograniczenia w zastosowaniach dynamicznych
- Brak możliwości skanowania obiektów w ruchu: TLS działa na zasadzie rejestrowania stacjonarnych chmur punktów, co oznacza, że nie nadaje się do skanowania obiektów w ruchu. W takich przypadkach lepsze mogą być skanery mobilne lub technologie lidarowe montowane na dronach, samochodach, plecakach.
Podsumowanie:
TLS oferuje ogromne możliwości w zakresie pozyskiwania precyzyjnych danych 3D, ale ma pewne ograniczenia, które należy wziąć pod uwagę podczas planowania projektu. Ograniczenia te obejmują zależność od warunków atmosferycznych, linię widzenia, złożoność przetwarzania danych, a także wysoki koszt sprzętu i wymaganą wiedzę techniczną.

Co powoduje błędy w rejestracji stanowisk skanera TLS?
Błędy w rejestracji stanowisk skanera TLS (Terrestrial Laser Scanner) mogą wynikać z kilku czynników, które wpływają na jakość łączenia danych z różnych pozycji skanera. Rejestracja polega na dopasowaniu i połączeniu chmur punktów uzyskanych z różnych stanowisk, co pozwala stworzyć spójny, trójwymiarowy model skanowanego obszaru. Oto główne przyczyny błędów w tym procesie:
1. Niedostateczna liczba punktów kontrolnych
- Brak wystarczającej ilości punktów wspólnych: Rejestracja stanowisk wymaga punktów kontrolnych lub charakterystycznych elementów, które są widoczne z różnych pozycji skanera. Jeśli między stanowiskami brakuje wystarczającej liczby takich punktów, oprogramowanie nie ma możliwości precyzyjnego dopasowania chmur punktów, co prowadzi do błędów. Konsekwencją tego będzie błędnie wykonana np. inwentaryzacja budowlana w oparciu o chmurę punktów.
- Źle rozmieszczone punkty kontrolne: Jeśli punkty wspólne są zbyt rzadko rozmieszczone lub znajdują się na dużych odległościach od siebie, rejestracja może być niedokładna.
2. Niedokładne skanowanie lub słaba rozdzielczość
- Niska rozdzielczość skanowania: Użycie niskiej rozdzielczości skanera (czyli mniejszej ilości punktów na jednostkę powierzchni) może sprawić, że szczegóły nie będą dobrze zarejestrowane, co utrudni znalezienie punktów wspólnych w różnych skanach. To prowadzi do nieprecyzyjnego dopasowania stanowisk.
- Błędy w odległościach: Niektóre powierzchnie (np. bardzo odbijające lub pochłaniające światło) mogą powodować zakłócenia w dokładności pomiarów odległości, co w efekcie prowadzi do nieprecyzyjnych danych.
3. Błyszczące, przezroczyste i jednolite powierzchnie
- Odbicia i zakłócenia: Powierzchnie szklane, metalowe, lustra czy woda mogą powodować odbicia wiązki laserowej, co wprowadza błędne dane. Skaner może „widzieć” fałszywe punkty, które nie odpowiadają rzeczywistej geometrii obiektu.
- Przezroczystość: Przezroczyste materiały, takie jak szkło, mogą być słabo widoczne dla skanera TLS, co prowadzi do brakujących danych, a co za tym idzie, trudności w rejestracji.
4. Złe warunki oświetleniowe i atmosferyczne
- Oświetlenie: Choć skanery TLS są zazwyczaj niewrażliwe na warunki oświetleniowe (ponieważ wykorzystują własne źródło lasera), bezpośrednie światło słoneczne może czasem wpływać na dokładność pomiarów, zwłaszcza gdy powierzchnie są jasne lub odbijające.
- Warunki atmosferyczne: Deszcz, mgła, kurz, śnieg lub inne cząsteczki w powietrzu mogą rozpraszać wiązkę laserową, co prowadzi do zakłóceń w danych pomiarowych. Brak dokładnych danych w jednym lub kilku stanowiskach może spowodować trudności z ich połączeniem.
5. Błędy w rozmieszczeniu stanowisk
- Zbyt duża odległość między stanowiskami: Jeśli stanowiska skanera są zbyt oddalone od siebie, wspólne punkty kontrolne mogą być zbyt rzadkie lub niewidoczne w obu skanach. To prowadzi do problemów z rejestracją danych z różnych pozycji.
- Zła geometria ustawienia: Jeśli skaner jest umieszczony pod niekorzystnym kątem, może nie uchwycić wystarczająco dużo informacji z sąsiednich obszarów, co utrudni łączenie chmur punktów.
6. Brak kul referencyjnych lub tarcz
- Niewłaściwe użycie celi (targetów) pomiarowych: W procesie skanowania często stosuje się tarcze kalibracyjne (tzw. targety), które ułatwiają rejestrację stanowisk. Błędy w rozmieszczeniu lub niewłaściwe użycie tych tarcz mogą prowadzić do problemów z rejestracją.
- Brak tarcz lub punktów kontrolnych: W niektórych sytuacjach brak użycia tarcz rejestracyjnych powoduje konieczność polegania wyłącznie na naturalnych punktach kontrolnych, co może zwiększać ryzyko błędów, zwłaszcza w złożonych scenariuszach terenowych.
7. Ruch obiektów podczas skanowania
- Obiekty w ruchu: Jeżeli w skanowanym obszarze poruszają się ludzie, pojazdy lub inne elementy (np. drzewa poruszane przez wiatr), mogą one wprowadzić szumy lub błędne dane w chmurze punktów. To z kolei może prowadzić do problemów w rejestracji stanowisk.
8. Błędy w oprogramowaniu
- Automatyczna rejestracja błędów: W przypadku używania oprogramowania do automatycznej rejestracji (np. Leica Cyclone, FARO Scene), czasami mogą wystąpić błędy algorytmów dopasowujących, zwłaszcza gdy dane są niskiej jakości lub brakuje wystarczających punktów kontrolnych.
- Niedokładna manualna rejestracja: W sytuacjach, gdy rejestracja jest wykonywana ręcznie, może dochodzić do ludzkich błędów podczas łączenia chmur punktów, co prowadzi do niedokładnych wyników.
9. Niedopasowanie układów współrzędnych
- Brak synchronizacji układów współrzędnych: Jeżeli skanery TLS są używane w połączeniu z innymi systemami (np. GNSS), brak synchronizacji układów współrzędnych może powodować błędy w rejestracji danych z różnych stanowisk.
10. Zbyt duża ilość danych
- Przeładowanie danymi: W przypadku bardzo dużych projektów, gdzie zbierana jest ogromna ilość danych, oprogramowanie może mieć trudności z przetwarzaniem i rejestracją wszystkich chmur punktów. Może to prowadzić do opóźnień lub błędów w dopasowywaniu danych.
Jak minimalizować błędy w rejestracji skanów?
- Używać dobrze rozmieszczonych punktów kontrolnych lub tarcz kalibracyjnych.
- Stosować odpowiednią rozdzielczość skanowania, dostosowaną do warunków i wymagań projektu.
- Planować skanowanie tak, aby stanowiska miały wystarczającą ilość wspólnych punktów z sąsiednimi skanami.
- Monitorować warunki atmosferyczne i unikać skanowania w niekorzystnych warunkach (deszcz, mgła).
- Używać nowoczesnego oprogramowania do automatycznej rejestracji danych, które jest regularnie aktualizowane.
- Kalibrować skaner regularnie i zapewnić jego poprawne działanie.
Dbałość o powyższe aspekty pozwoli minimalizować błędy w rejestracji stanowisk skanera TLS i uzyskać dokładne dane 3D.
Jak poprawić rejestrację skanów i dokładność uzyskanej chmury punktów?
Aby poprawić rejestrację stanowisk skanera TLS (Terrestrial Laser Scanner), czyli proces łączenia danych z różnych pozycji skanowania w spójny model 3D, można zastosować kilka technik i najlepszych praktyk. Kluczowym elementem jest uzyskanie wysokiej jakości chmury punktów oraz precyzyjnego dopasowania danych. Oto sposoby na poprawę rejestracji:
1. Właściwe rozmieszczenie stanowisk skanera
- Zachowanie wystarczającej ilości wspólnych obszarów: Kluczowe dla rejestracji jest to, aby sąsiednie skany miały co najmniej 30-50% pokrycia. Wspólne obszary powinny być dobrze widoczne w kilku stanowiskach, co zwiększy liczbę punktów kontrolnych, ułatwiając ich dopasowanie.
- Redukowanie odległości między stanowiskami: Upewnij się, że stanowiska skanera nie są zbyt oddalone od siebie, ponieważ może to prowadzić do problemów z identyfikacją punktów wspólnych. Im większe zbliżenie między stanowiskami, tym dokładniejsze będzie dopasowanie chmur punktów.
2. Użycie punktów kontrolnych lub tarcz referencyjnych
- Tarcze rejestracyjne (targety): Umieszczenie tarcz lub specjalnych znaczników (np. sfer lub płaskich tarcz kalibracyjnych) w obszarach skanowania ułatwia automatyczną rejestrację i dopasowanie danych. Tarcze te powinny być rozmieszczone strategicznie, aby były widoczne z co najmniej dwóch stanowisk.
- Wybór naturalnych punktów kontrolnych: Jeśli nie używa się tarcz, można wybrać dobrze widoczne, naturalne punkty kontrolne, takie jak narożniki budynków, krawędzie mebli, detale architektoniczne czy słupki. Te punkty będą służyć jako referencje podczas łączenia skanów.
3. Zastosowanie odpowiedniej rozdzielczości skanowania
- Dostosowanie rozdzielczości do wymagań: Użycie zbyt niskiej rozdzielczości skanowania może prowadzić do utraty szczegółów, co utrudnia rejestrację stanowisk. Dostosuj rozdzielczość do złożoności obiektu – w bardziej skomplikowanych miejscach lub tam, gdzie są detale, wybierz wyższą rozdzielczość.
- Unikaj zbędnej szczegółowości: Choć wysoka rozdzielczość daje bardziej szczegółowe dane, może również znacząco zwiększyć objętość danych, co utrudnia przetwarzanie. Wybieraj optymalną rozdzielczość, która balansuje pomiędzy dokładnością a efektywnością pracy.
4. Korzystanie z nowoczesnego oprogramowania do rejestracji
- Automatyczne algorytmy rejestracji: Oprogramowanie takie jak Leica Cyclone, FARO SCENE, Trimble RealWorks czy Autodesk Recap posiada zaawansowane algorytmy automatycznej rejestracji, które są w stanie samodzielnie dopasować chmury punktów, rozpoznając wspólne elementy. Regularne aktualizacje oprogramowania zapewniają nowe funkcje, które mogą poprawić precyzję rejestracji.
- Manualna korekta: W przypadku, gdy automatyczna rejestracja nie daje idealnych wyników, oprogramowanie pozwala na manualną korektę. Użytkownik może wskazać wspólne punkty lub dopasować stanowiska ręcznie, co zwiększa dokładność.
5. Kalibracja skanera i dbałość o sprzęt
- Regularna kalibracja sprzętu: Skanery TLS, podobnie jak inne urządzenia pomiarowe, wymagają okresowej kalibracji, aby zachować najwyższą dokładność. Niewłaściwie skalibrowany skaner może generować błędne pomiary, co negatywnie wpłynie na rejestrację.
- Dbanie o sprzęt: Zadbaj o to, aby sprzęt był zawsze w dobrym stanie technicznym, w tym o czystość soczewek i czujników, ponieważ zabrudzenia mogą zakłócać precyzyjność skanowania.
6. Optymalne warunki atmosferyczne
- Unikanie złych warunków pogodowych: Deszcz, śnieg, mgła i kurz mogą wprowadzać zakłócenia w chmurach punktów, co utrudnia późniejszą rejestrację. W miarę możliwości planuj skanowanie w korzystnych warunkach atmosferycznych, aby uniknąć strat w danych.
- Unikaj bezpośredniego słońca na refleksyjnych powierzchniach: Powierzchnie odbijające światło mogą zakłócać pomiar, dlatego w miarę możliwości skanuj w warunkach rozproszonego światła lub w cieniu.
7. Lepsze planowanie skanowania
- Przemyślane rozmieszczenie stanowisk: Zanim rozpoczniesz skanowanie, dobrze zaplanuj lokalizację stanowisk skanera, biorąc pod uwagę dostępność punktów wspólnych, zasięg skanera oraz ograniczenia terenu. Unikaj umieszczania skanera zbyt blisko dużych przeszkód, które mogą ograniczyć pole widzenia.
- Testowanie ustawień: W niektórych przypadkach warto wykonać próbne skany, aby upewnić się, że wybrane stanowiska i ustawienia skanera są odpowiednie dla danego projektu.
8. Korzystanie z georeferencji
- Wykorzystanie GNSS lub tachimetrów: W przypadku dużych projektów, zwłaszcza w terenie, użycie georeferencji (np. systemów GPS lub tachimetrów) pozwala precyzyjnie ustawić stanowiska skanera w jednym układzie współrzędnych. To umożliwia lepszą integrację danych z różnych skanerów i ich precyzyjną rejestrację.
- Korzystanie z układów współrzędnych: Jeżeli projekt wymaga precyzyjnego odniesienia do układów współrzędnych (np. w przypadku prac geodezyjnych), należy upewnić się, że wszystkie dane są zbierane w tym samym układzie.
9. Eliminacja ruchomych obiektów
- Unikanie ruchu podczas skanowania: W miejscach, gdzie poruszają się ludzie, maszyny lub pojazdy, staraj się unikać skanowania w czasie, gdy ruch jest intensywny. Ruchome obiekty mogą wprowadzać błędy, które będą zakłócać proces rejestracji.
10. Kontrola jakości po każdym etapie skanowania
- Weryfikacja jakości rejestracji: Po zakończeniu każdego etapu skanowania warto sprawdzić jakość rejestracji chmur punktów, aby upewnić się, że dopasowanie stanowisk jest dokładne. Wczesne wykrycie problemów pozwala na ich szybką korektę, co zapobiega błędom na dalszych etapach projektu.
11. Użycie dodatkowych technologii wspomagających
- Fotogrametria: W niektórych przypadkach, zwłaszcza gdy TLS ma trudności z rejestracją chmur punktów np. na dachach budynków, pomocna może być integracja z technologiami fotogrametrycznymi (np. zdjęciami z dronów). Obrazy te mogą pomóc w identyfikacji dodatkowych punktów kontrolnych i poprawić jakość dopasowania chmur punktów.
- Skanowanie mobilne: W projektach, gdzie obiekty są rozległe, użycie mobilnych skanerów lidarowych (np. zamontowanych na pojazdach lub dronach) może ułatwić zbieranie danych i zwiększyć ilość punktów kontrolnych dla rejestracji.
Podsumowanie:
Aby poprawić rejestrację stanowisk skanera TLS, warto zadbać o odpowiednie planowanie skanowania, używać dobrze rozmieszczonych punktów kontrolnych, kalibrować sprzęt oraz stosować nowoczesne oprogramowanie. Kluczowa jest dbałość o jakość danych na każdym etapie – od skanowania po przetwarzanie chmur punktów. Dzięki tym praktykom rejestracja będzie bardziej precyzyjna i efektywna, co przełoży się na lepszą dokładność rejestracji chmury punktów.
Jaki skaner laserowy wybrać?